老人跌倒偵測與緊急通報機器人
AI 跌倒偵測 · 多機器人自主導航系統
跌倒危機
跌倒是高齡者致命與非致命傷害的主要原因。
延遲救援會使死亡率提升
- 穿戴式裝置經常被忘記佩戴或不舒適
- 固定式攝影機存在死角與隱私問題
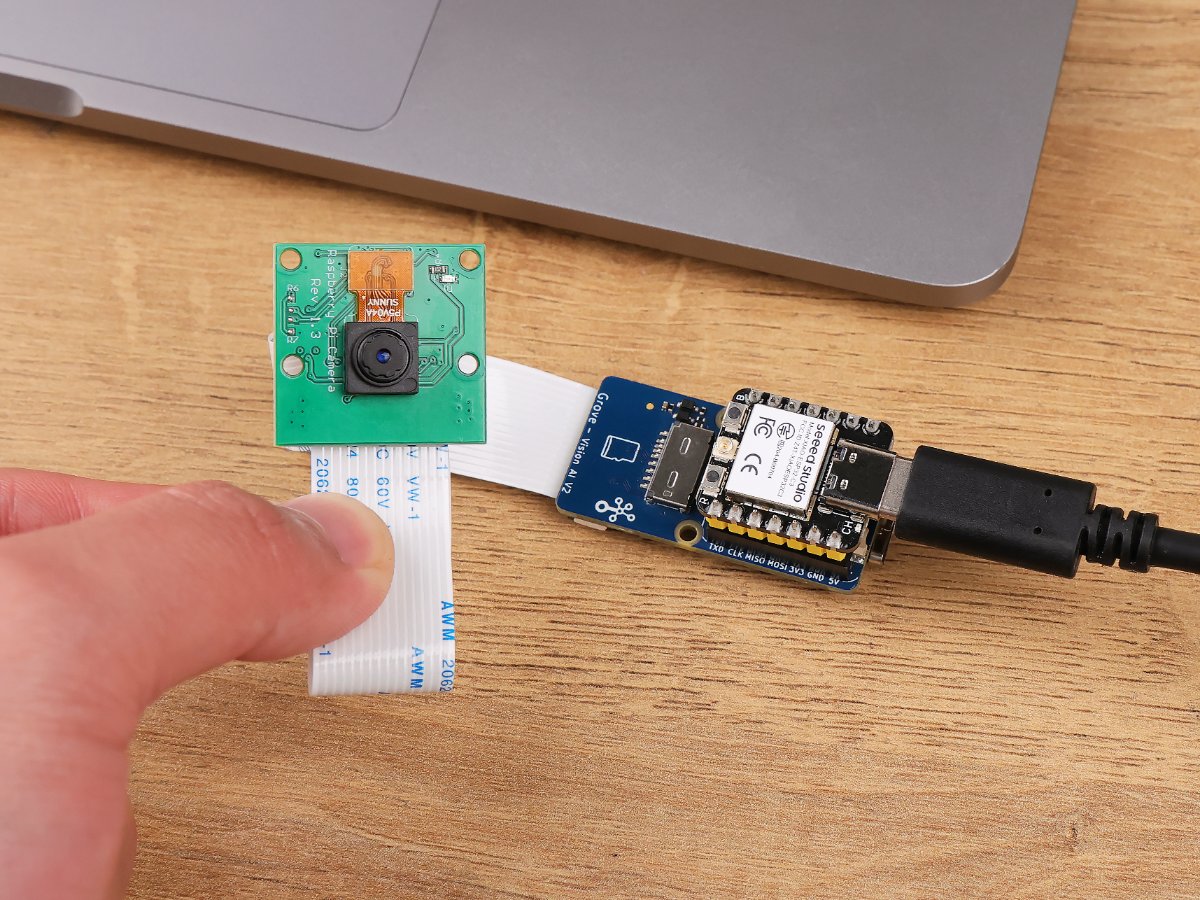
機器人的 「眼睛」
Grove Vision AI Module V2 — 由 WiseEye2(Arm Cortex-M55 + Arm Ethos-U55 NPU)驅動。
— S3
系統決策 · 連線中心
- 透過 I2C / UART 連接 AI 模組
- 管理即時馬達控制
- 管理警報報警
YOLOv8n-Pose
即時擷取 17 個人體關鍵點。
聚焦於髖部、肩部與軀幹向量,計算身體狀態與方向。
四大 幾何 指標
ESP32 無需大量神經網路運算 · 10 幀滑動視窗驗證,排除雜訊(如蹲下動作)。
邊界框長寬比
監測偵測框 高度與寬度的比例。
表示可能處於臥倒姿勢
中心高度比例
分析人體中心點(髖部)相對於影像畫面的高度。
代表重心顯著降低
中心點速度
偵測突然向下的垂直加速度。
代表突然下降
軀幹傾斜角
軀幹相對於垂直軸的絕對角度。
機械結構
- 後輪驅動 · 3V 小型 DC 馬達
- 轉向控制 · SG90 高扭力伺服馬達
- 小型化機身 · 適合室內移動
電晶體 保護 電路
防止高電流反衝影響 ESP32 邏輯腳位。
- 2N2222 NPN 電晶體 · 作為 3V 馬達的開關
- 確保電路板在連續負載下的長期可靠性
目標 置中
機器人會根據邊界框中心偏移量調整 SG90 轉向。
- 不需要 LiDAR — 具備成本效益的設計
- 邊界框面積縮放維持 1.5 公尺最佳距離
比例-積分-微分 控制
平滑化移動控制,避免搜尋式擺動或震盪。
目標:將誤差(邊界框 X − 中心 X)維持在 0。
即時 本地 回應
- 啟動高分貝 蜂鳴器警報
- 啟動 LED 視覺 求救訊號
- 喚醒附近家人或提醒鄰居
即時數位 推播
透過台灣最常用的通訊平台 LINE 進行警報通知。
- ESP32 透過 LINE 訊息 API 觸發 HTTPS POST
- 包含時間戳記與事件類別
- 延遲 < 3 秒
當時間流逝 · 層層升級
本地警報
蜂鳴器 · LED
LINE 推播
家人即時收到通知
語音通話
網路電話或 SMS 警報
EMS 119
緊急醫療 / 長照中心
中介軟體 架構
LINE Bot Webhook
由 ESP32 直接傳送
JSON Payload
狀態中繼資料
{ event: "FALL",
ts: "...",
room: "L-RM" }
MQTT Sync
多機器人同步
視覺 SLAM
建立居家空間結構地圖,讓機器人可進行非視覺導航。
- 產生 Point Cloud · 居家空間配置
- 依房間情境制定對應策略
熱插拔 策略
機器人 A 電量降至 20% 時,機器人 B 前往相同房間座標接替任務 — 監控不中斷。
座標 轉移
確保輪替過程中監控不中斷。
- 機器人 B 接收最後已知的 房間位置 與 目標座標
- B 車無縫接手追蹤任務
- A 車依照已建立地圖路徑返回基地
{
"room": "BEDROOM",
"target": [3.4, 2.1],
"last_seen": "14:32:08",
"status": "TRACKING"
}
可靠性 優先
若視覺邏輯當機,底層硬體會立即停止。
- ESP32 程式內建 看門狗計時器
- 實體 防撞桿中斷機制
整機平均功耗 · 優化效率
| 視覺 AI V2(WiseEye2) | 0.35 W |
| ESP32-S3 | ~0.50 W |
| DC 馬達 + SG90 伺服 | ~0.60 W |
| 系統總功耗 | ~1.45 W |
邊緣運算 優勢
不上傳影像
僅傳輸關鍵點與狀態中繼資料
本地處理
神經網路完全在 WiseEye2 NPU 內執行
SSL / TLS
所有雲端訊息皆加密傳輸